

On a camping trip in Ontario, Evan Budz spotted a snapping turtle gliding through the water. The 15-year-old noticed how little it disturbed its surroundings, barely a ripple, and started thinking about what that kind of movement could do for underwater science. Within months, he had built a working robot.
The device Budz created, which he calls BURT (Bionic Underwater Robotic Turtle), is an autonomous robot modeled on the swimming mechanics of a green sea turtle. It uses artificial intelligence to scan aquatic environments for ecological threats, and in testing it detected replicated coral bleaching with 96 percent accuracy.
The project earned Budz first prize at the European Union Contest for Young Scientists, held in Riga, Latvia in September 2025, along with a €7,000 award. He had previously won Best Project (Innovation) at the 2025 Canada-Wide Science Fair, which drew from approximately 25,000 competitors nationwide.
A Robot Built to Move Like a Real Turtle
Most underwater drones use propellers or high-pressure water jets that can erode delicate habitats and stress marine life. Budz wanted something quieter. He studied sea turtle locomotion by watching videos and consulting experts at his local aquarium, learning how the animals use their front flippers for propulsion and their rear limbs for steering.
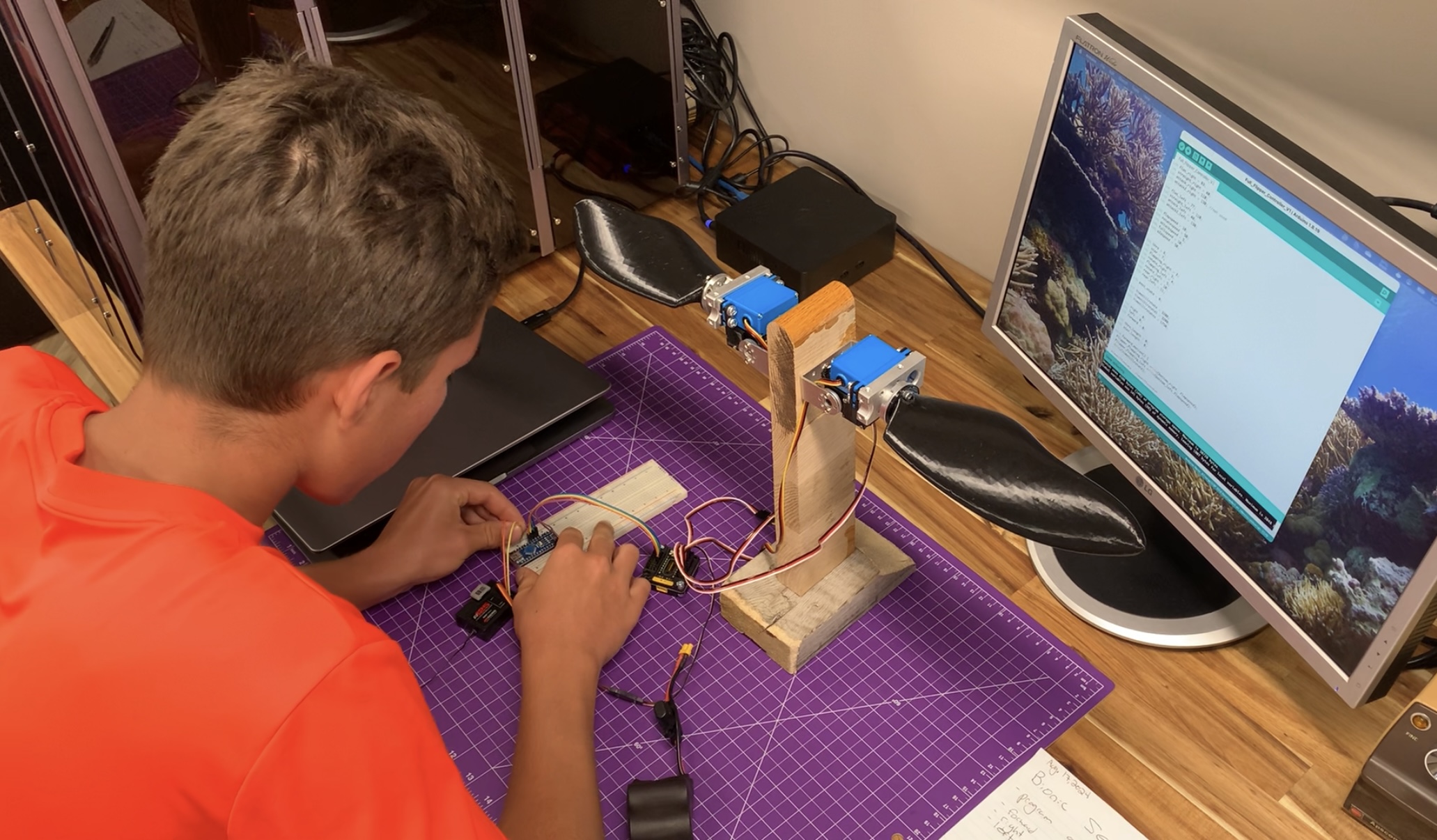
He designed BURT in SolidWorks, a 3D CAD software, and 3D-printed the components himself. The robot has four flippers that replicate this same division of labor. Its body is an acrylic tube housing a Raspberry Pi microcomputer, which runs the AI detection models and handles data recording and transmission. External sensors manage depth control, GPS-guided navigation, and obstacle detection. A front-mounted camera feeds visual data back to the onboard system.
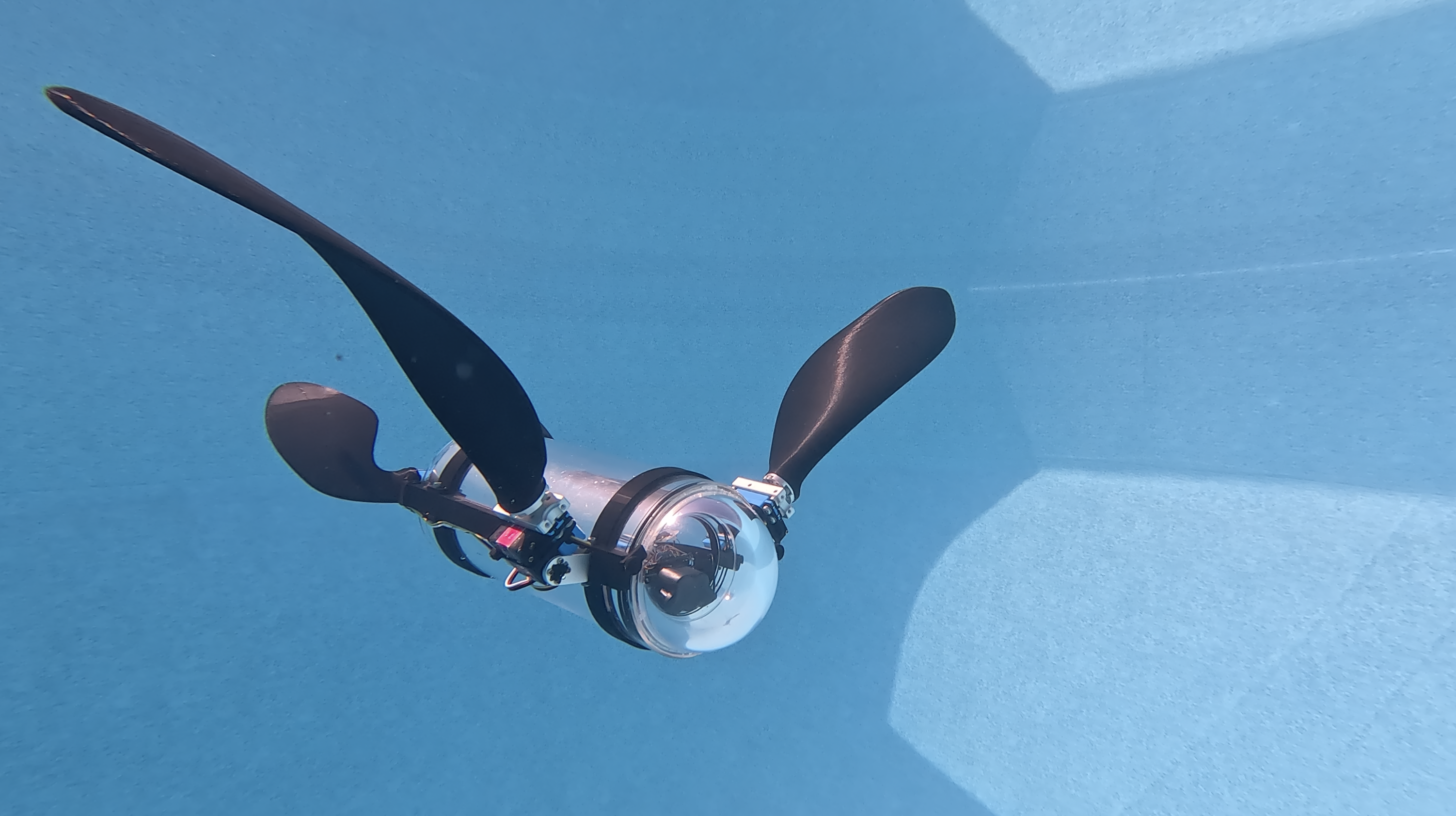
BURT weighs about 11 pounds, with added metal ballast to achieve neutral buoyancy. It can run for up to eight hours on a lithium battery, with a solar panel extending that range further. Budz has the robot set to swim at roughly 0.5 miles per hour, the typical pace of a real sea turtle, though he says he can increase the speed by adjusting the flipper stroke frequency.
Testing in a Backyard Pool, Then Lake Ontario
Most of BURT’s development took place in his grandparents’ backyard pool, which runs just over eight feet deep. Budz built a simulated coral reef using 3D models and programmed the robot to recognize what coral bleaching and invasive species look like. The turtle then navigated around those models to test detection performance in a controlled setting.
BURT follows a predetermined search grid, which means it requires no tether or remote operator. All recorded data feeds into the Raspberry Pi and can be transmitted externally. Budz also tested the robot in Lake Ontario, extending trials beyond the pool environment.

For murkier water conditions, he added lights to the front of the robot and installed an ultrasonic transducer, which uses high-frequency sound waves to detect obstacles. He has since developed a holographic imaging device that records the shapes and structural characteristics of tiny particles in the water. A custom-trained neural network then classifies whether each particle is a microplastic.
Awards and What the Project Set Out to Solve
According to Youth Science Canada, Budz competed at EUCYS alongside young scientists aged 14 to 20 from 40 countries. His first-place finish continued a streak: it marked the fourth consecutive year Canadian students won two top prizes at the competition. Fellow Canadian Sara Waqas, from Calgary, took second prize for her research into targeted schizophrenia treatment.
Budz also received the Ellison Scholars Award, which includes an all-expenses-paid visit to Oxford University.

“My parents brought me up with the sort of principle that every place that I visit, I should leave it a bit better than I found it,” Budz told Popular Science. That philosophy shaped the design from the start. He explicitly wanted BURT to gather data without causing the damage that conventional underwater technology sometimes creates.
His goal, as stated in the Popular Science interview, is to eventually deploy a fleet of the robots to monitor aquatic environments across different threat types. He has already targeted coral bleaching, invasive species, and microplastics as detection categories, with the holographic imaging system representing his most recent expansion of that capability.





No comments:
Post a Comment